机器人工程产品概念
一个用于生成未来感人体工学机器人工程草图和宏观产品渲染图的复杂设计提示词。
- 分类
- 图表信息图
- 模型
- GPT Image 2
- 来源作者
- Gadgetify
- 原始语言
- en
- 来源 ID
- 20792
- 发布时间
- 2026年5月16日
完整提示词
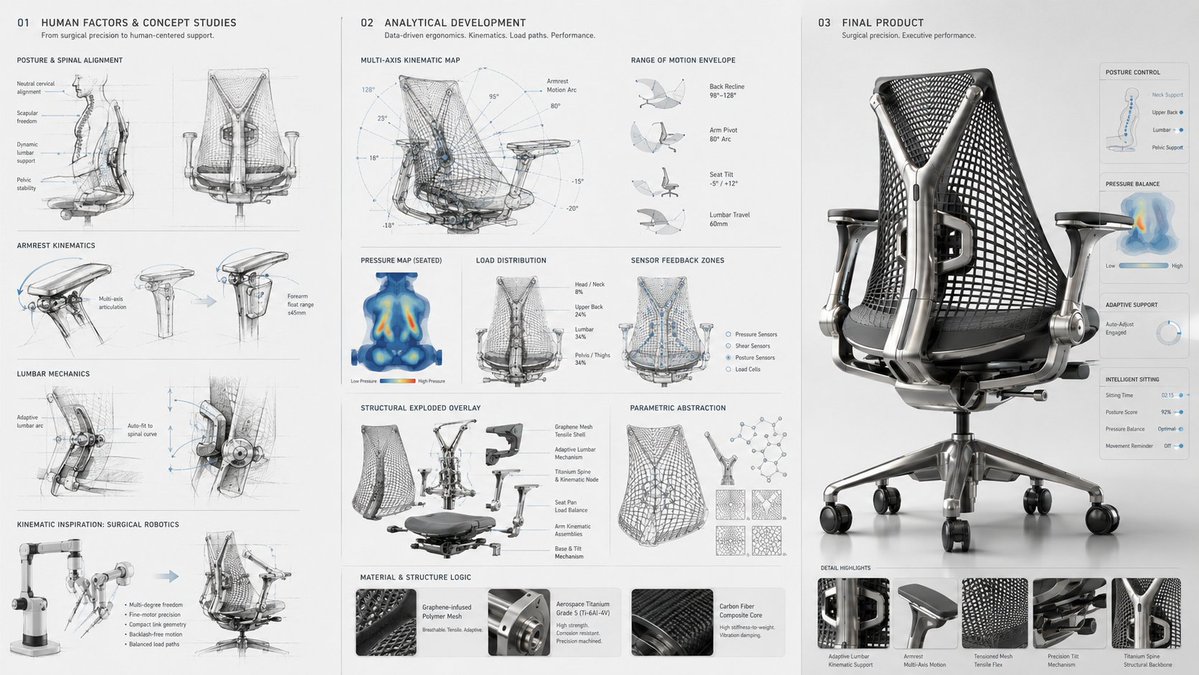
人体工学微型机器人,{argument name="device" default="先进手术/机器人设备"} 的高保真触觉反馈机制塑造出动态自适应的 {argument name="product" default="人体工学座椅/可穿戴设备"},从 [运动学运动范围映射] 到 [负载分布传感器图] 再到结构参数化抽象,最后到最终产品的序列,AI 推断生物力学转换,利用 [material 1] 关节和 [material 2] 透气网格,包含侧面板 UI/UX 界面一瞥,[aesthetic style] 美学,展示布局:左侧为人机工程学草图,中间为承重线框图,右侧为超精细宏观产品渲染图,[lighting style]。输入:[达芬奇手术机械臂]、[高管办公椅]、[多轴动力学线框图]、[压力点热力图]、[拉丝航空钛合金]、[石墨烯注入聚合物]、[Herman Miller 与未来医疗的结合]、[干净、漫射的日光模拟] 16:9多语言版本
机器人工程产品概念
energonomic micro-robotics, the high-fidelity haptic feedback mechanisms of {argument name="device" default="advanced surgical/robotic device"} shaping a dynamically adaptive {argument name="product" default="ergonomic seating/wearable"}, sequence from [kinematic range-of-motion mapping] to [load-distribution sensor diagrams] to structural parametric abstraction to final product, ai to infer bio-mechanical translation utilizing [material 1] joints and [material 2] breathable meshes, including side-panel ui/ux interface glimpses, [aesthetic style] aesthetic, presentation layout: human-factors engineering sketches on the left, load-bearing wireframes center, hyper-detailed macro product render right, [lighting style]. input: [da vinci surgical robotic arm], [c-suite executive task chair], [multi-axis kinetic wireframes], [pressure-point heat maps], [brushed aerospace titanium], [graphene-infused polymer], [herman miller meets futuristic medical], [clean, diffuse daylight simulation] 16:9
机器人工程产品概念
zh-CN人体工学微型机器人,{argument name="device" default="先进手术/机器人设备"} 的高保真触觉反馈机制塑造出动态自适应的 {argument name="product" default="人体工学座椅/可穿戴设备"},从 [运动学运动范围映射] 到 [负载分布传感器图] 再到结构参数化抽象,最后到最终产品的序列,AI 推断生物力学转换,利用 [material 1] 关节和 [material 2] 透气网格,包含侧面板 UI/UX 界面一瞥,[aesthetic style] 美学,展示布局:左侧为人机工程学草图,中间为承重线框图,右侧为超精细宏观产品渲染图,[lighting style]。输入:[达芬奇手术机械臂]、[高管办公椅]、[多轴动力学线框图]、[压力点热力图]、[拉丝航空钛合金]、[石墨烯注入聚合物]、[Herman Miller 与未来医疗的结合]、[干净、漫射的日光模拟] 16:9